Real-time vision for factories
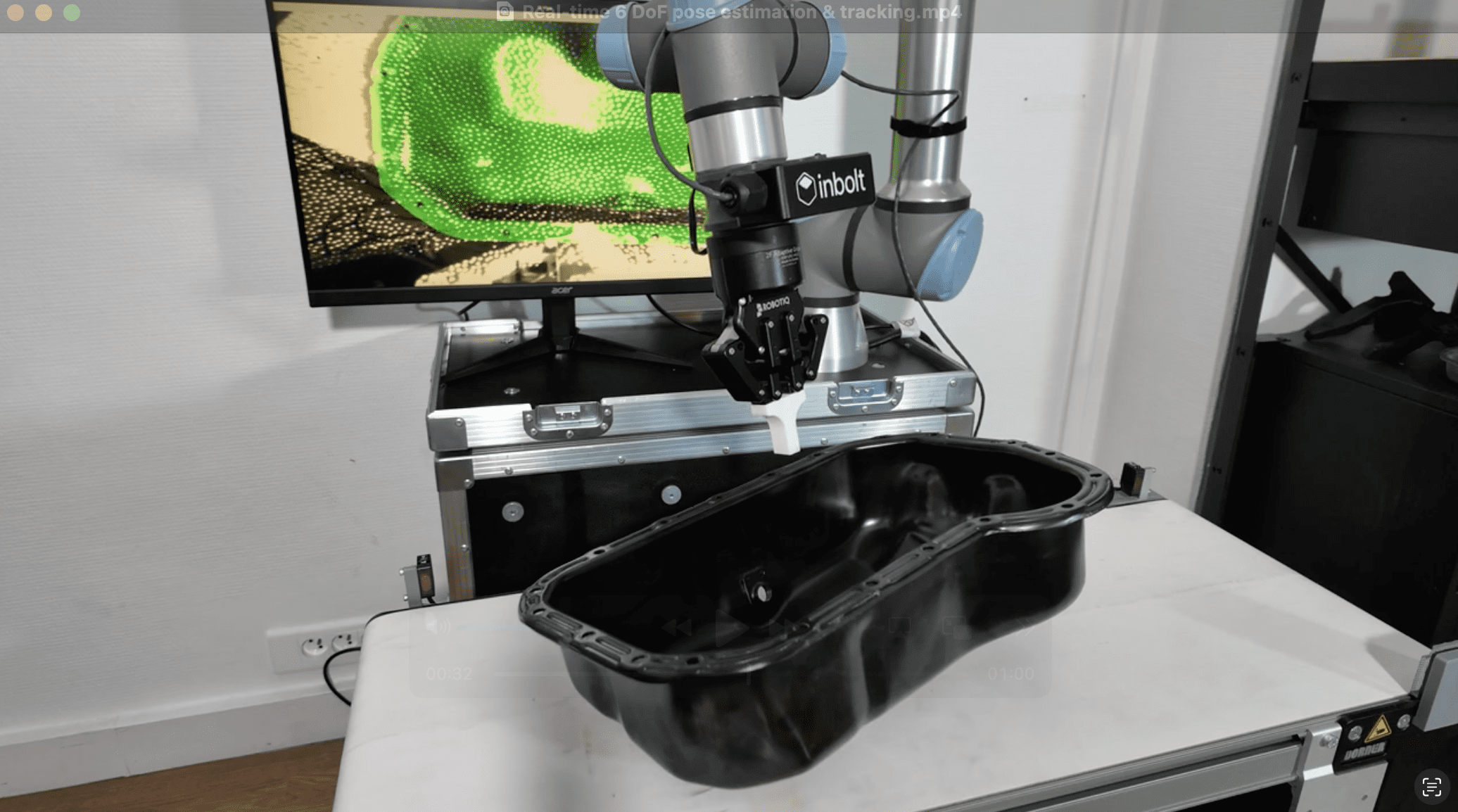
The Inbolt Vision Model is the first real-time, production-proven vision model for industrial robots. Delivering sub-millimeter 6DoF pose estimation and tracking in under 2 ms from CAD input, it makes automation truly flexible, reliable, and scalable.

Proven impact, measurable results
150
+ 150
Robots deployed in production
< 2 ms
Real-time 6DoF pose updates
CAD only
Setup, ready in minutes
Why industrial vision was failing
Robots don’t fail because “AI is not good enough.”
They fail because vision models are trained and built for clean, predictable, repeatable environments, not for real factories.
Real factories mean:
- Harsh lighting, reflections, shadows
- Vibrations and unstable fixtures
- Moving lines with unpredictable speed
- Hard shiny parts with low texture
- Cycle times that tolerate no delay
Every other vision model breaks here. Ours doesn’t.

Core vision model capabilities
Real-time 6DoF tracking, sub-millimeter accuracy, CAD-based setup, and robustness built for real factory conditions.
Real-time (<2 ms)
The model updates fast enough to enable dynamic decision-making and continuous robot trajectory correction.
No buffering. No batching. No timeout spikes.
Dynamic tracking on moving lines
Adapts to changing speeds, jumps, vibration, rotation, and misaligned parts. With robot drivers running up to 500 Hz, the model delivers real-time 6DoF tracking that finally makes continuous moving-line automation achievable.

Sub-millimeter Accuracy
Validated across diverse factory environments, the model delivers sub-millimeter accuracy for fastening, assembly, loading and unloading tasks.
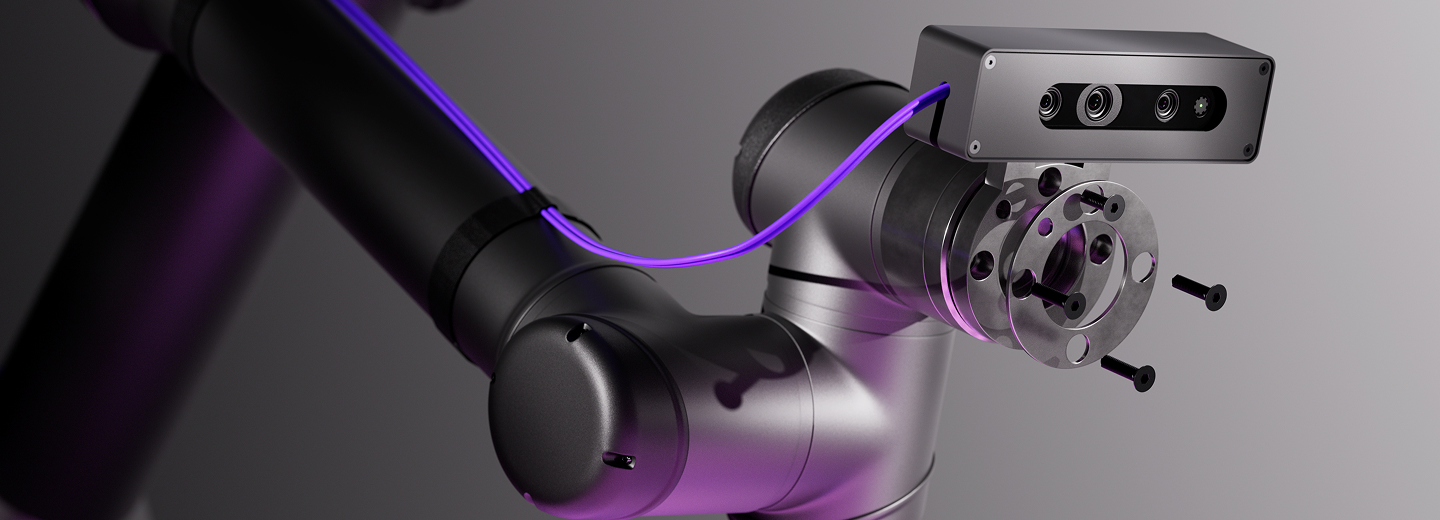
CAD-based pipeline
Upload your CAD, the model fine-tunes on-device, and you’re ready in minutes. No datasets, no labeling. A pipeline built to scale effortlessly across hundreds of stations.
Multi-object understanding
Detects and tracks multiple parts in cluttered or semi-ordered scenes, making it ideal for bin picking, random presentation, and high-variation workflows.

Robustness to factory variability
The model handles lighting changes, shadows, reflections, specular surfaces, occlusions, vibration, and shifting backgrounds. Built to stay reliable in real factory conditions.
Why Real-Time Matters
Real-time robot pose estimation & tracking is the key to unlock mass automation.

Automation without limits
Real-time tracking makes moving lines, flexible flows, and semi-structured stations finally automatable.

Higher station reliability
Robots remain accurate even as parts shift, lighting changes, or stations wear over time.

Latency that drives speed
Ultra-low latency means faster robot moves, tighter cycles, and higher overall output.

Precision when it matters
Robots stay precise in dynamic or unstable conditions thanks to millisecond-level tracking.

Real-time robot control layer
Real-time perception only matters if the robot can respond instantly. Inbolt’s custom control drivers convert high-frequency pose updates into smooth, deterministic motion, closing the loop between vision and action.
Our drivers:
-
Stream trajectory corrections up to 500 Hz depending on robot brand
-
Maintain stable motion under vibration and varying line speeds
-
Ensure deterministic, repeatable cycle times
This is the only real-time perception-to-control stack deployed at scale in factories today.

Proven at scale
150
+ 150
Robots deployed across top automotive OEMs
2
2 M
Hours of continuous operation
99.99%
Detection reliability across real industrial conditions
Explore more from Inbolt
Access articles, use cases, and resources to see how Inbolt drives intelligent automation worldwide.
NVIDIA & UR join forces with Inbolt for intelligent automation
Reliable 3D Tracking in Any Lighting Condition

KUKA robots just got eyes: Inbolt integration is here
Explore what’s possible
Want to explore how the Inbolt Vision Model can fit your robots, products, or production lines? Contact us to discuss your needs or join the waitlist for early access.
