What bin picking really means in production: from semi-structured to unstructured environments

In conference halls and demo booths, bin picking looks deceptively simple. A robot reaches into a container, selects a part, and places it precisely where it needs to go. In production, that same task becomes one of the clearest stress tests of whether an automation system is truly robust, or merely well-calibrated.
Bin picking is not just another robotic application. It is where perception, motion planning, and real-time control collide with the variability of the physical world. And the physical world, unlike a lab setup, never stands still.
What Bin Picking Really Means in Production
At a technical level, bin picking requires a robot to detect a part in three dimensions, estimate its full pose, select a viable grasp, execute the pick, and deliver it accurately to the next process. That chain must run continuously, at cycle time, under shifting conditions.
The challenge lies in variability. Parts overlap. Bins are rarely indexed perfectly. Lighting drifts across shifts. Tolerances accumulate. Racks deform over time. Vibrations cause parts to settle differently with every refill.
The core bin picking documentation emphasizes this gap between demo performance and factory reality. What works under controlled conditions often breaks when exposed to the layered variability of live production.
The question is not whether a robot can pick a part once. It is whether it can do so reliably, every cycle, without demanding that the environment be engineered into submission.
Why Traditional Bin Picking Struggles
Traditional systems were designed around a static-world assumption. They rely on fixed overhead cameras, tightly calibrated setups, and pre-defined grasp strategies. That architecture performs well when the bin is always in the same place, the parts are neatly arranged, and lighting is stable.
Factories rarely behave that way.
When bins shift slightly, parts overlap unpredictably, or lighting changes, small deviations cascade into missed picks and downtime. This is where capabilities such as Inbolt’s automatic bin position detection become critical to maintaining stability without rigid indexing. The more rigid the system, the more fragile the outcome.
To compensate, manufacturers often add infrastructure: heavy fixtures, indexing mechanisms, mechanical guides, and frequent recalibration routines. Automation becomes expensive not because the robot is costly, but because the environment must be constrained around it.
Bin picking exposes that cost structure immediately.
The Crucial Distinction: Semi-Structured vs. Unstructured
Not all bin picking is created equal. The real dividing line in production is between semi-structured and fully unstructured environments.
In semi-structured scenarios, parts share a common orientation. They may sit in trays, shallow bins, or pallets. Position varies slightly, but visibility is high and overlap is limited. The robot’s task is to localize each part quickly, often using Inbolt’s search & find approach to detect the first available part, and adjust its trajectory dynamically. These applications are common in depalletization and line loading, where consistency exists but precision still matters.
Unstructured bin picking is a different problem entirely. Parts can lie in any orientation. They overlap, stack, tilt, and partially hide one another. Their positions are completely unknown. Bulk bins feeding machining centers or assembly lines fall into this category.
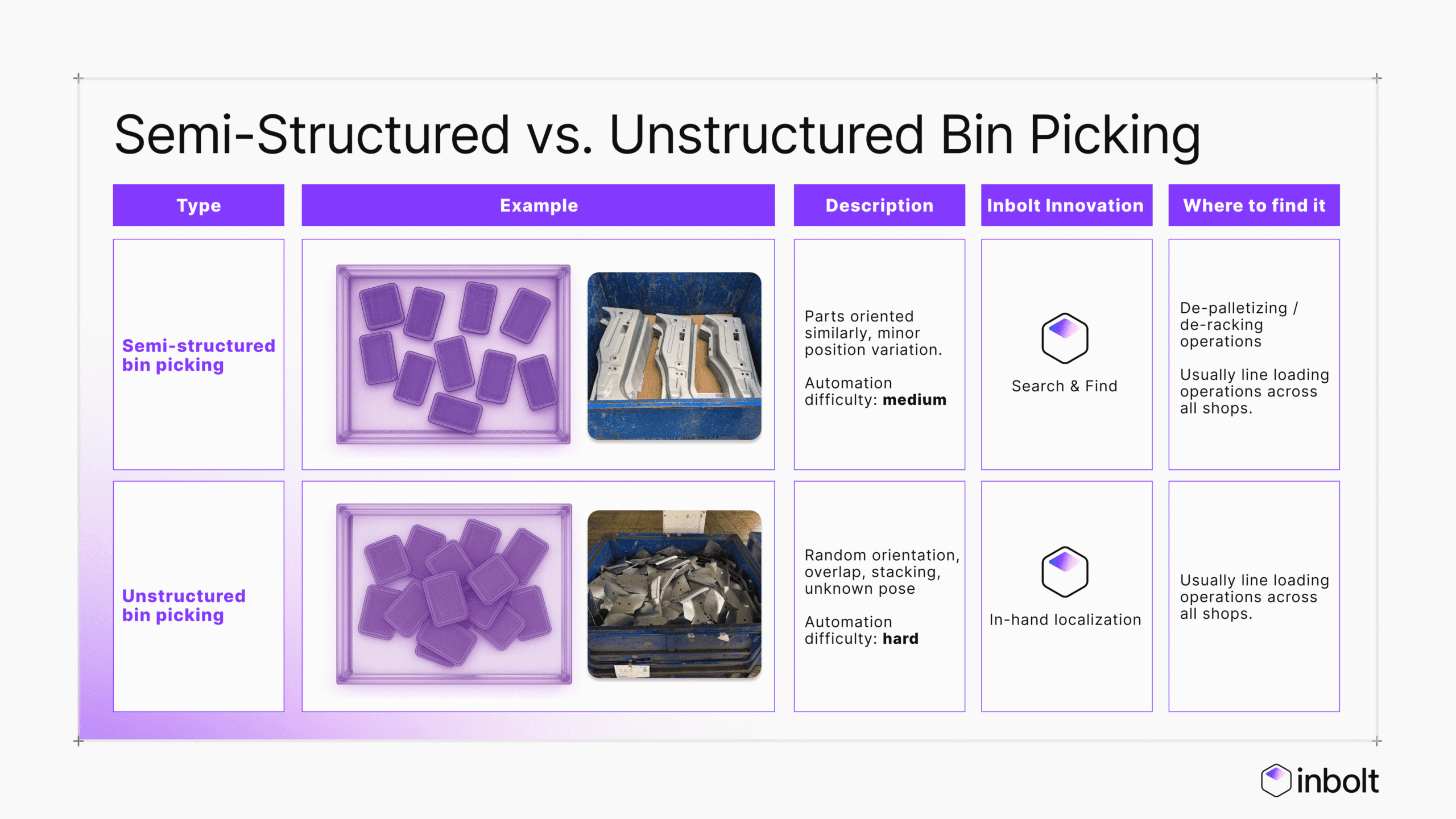
In these environments, the robot must continuously interpret cluttered geometry, perform what we call dynamic grasp planning at Inbolt to identify viable contact points, and adapt its motion in real time. It must behave less like a programmed machine and more like a skilled operator reaching into a chaotic container.
The architectural requirements shift dramatically between these two categories. Semi-structured picking demands speed and precision. Unstructured picking demands adaptability and continuous perception.
Moving Vision from the Cell to the Robot
One of the most consequential shifts in bin picking architecture is the relocation of vision itself. Instead of observing the bin from a fixed overhead perspective, modern systems increasingly mount the 3D camera directly on the robot arm.
The concept is simple but transformative: vision follows the robot’s point of view. A single robot-mounted camera handles any bin position, eliminating the need for complex multi-camera rigs and reducing calibration dependency.

From a control standpoint, this enables continuous perception during motion. Pose estimates are refreshed while the robot moves. Trajectories are refined dynamically. If a part shifts slightly during grasp, the system compensates downstream rather than propagating error.
This is especially critical in unstructured environments, where static snapshots of the bin are insufficient. The robot must see, adjust, and refine in real time.
In-Hand Localization: Closing the Loop
Many bin picking systems treat the grasp as the final act of perception. In production, that is where the next challenge begins.
Inbolt’s in-hand localization allows the robot to analyze and refine the part’s pose after it has been gripped. The trajectory is adjusted during motion to ensure accurate placement. This closed-loop behavior is what separates a reliable system from one that accumulates small pose errors into downstream misalignment.
For high-precision insertion or machine loading, this continuous refinement becomes essential. Without it, pick uncertainty translates into placement variability, forcing additional mechanical constraints or operator intervention.
Performance Under Production Constraints
Ultimately, bin picking succeeds or fails on measurable performance. Inbolt’s production outcomes highlight sub-second pick cycles and pick success rates approaching 95% in live conditions.
These numbers matter because bin picking economics are unforgiving. Cycle time must remain stable. Downtime must be minimized. Hardware complexity must not balloon as cells scale across a plant network.
When bin picking can be deployed with minimal mechanical modification and trained directly from CAD models, it transitions from a niche application to a scalable capability.
Bin Picking as a Litmus Test for Autonomy
Bin picking reveals whether a robot is executing pre-defined motion or adapting to reality. It forces the integration of 3D perception, AI-driven pose estimation, and real-time trajectory control. It removes the safety net of rigid fixtures and indexing.
In that sense, bin picking is not simply about emptying containers. It is a proving ground for autonomous manufacturing. Semi-structured applications test precision under light variability. Fully unstructured environments test adaptability under chaos.
Factories that solve both move closer to a model where robots are not programmed around a frozen world, but operate within one that constantly changes.
And on a production floor, change is the only constant.
Explore more from Inbolt
Access similar articles, use cases, and resources to see how Inbolt drives intelligent automation worldwide.
Why the future of automation is being written by the automotive industry
Reliable 3D Tracking in Any Lighting Condition

The Circular Factory - How Physical AI Is Enabling Sustainable Manufacturing
NVIDIA & UR join forces with Inbolt for intelligent automation
KUKA robots just got eyes: Inbolt integration is here
Albane Dersy named one of “10 women shaping the future of robotics in 2025”

Want to Sound Smart About Vision‑Guidance for Robots?